1.1. LakiBeam
1.1.1. 安装指南
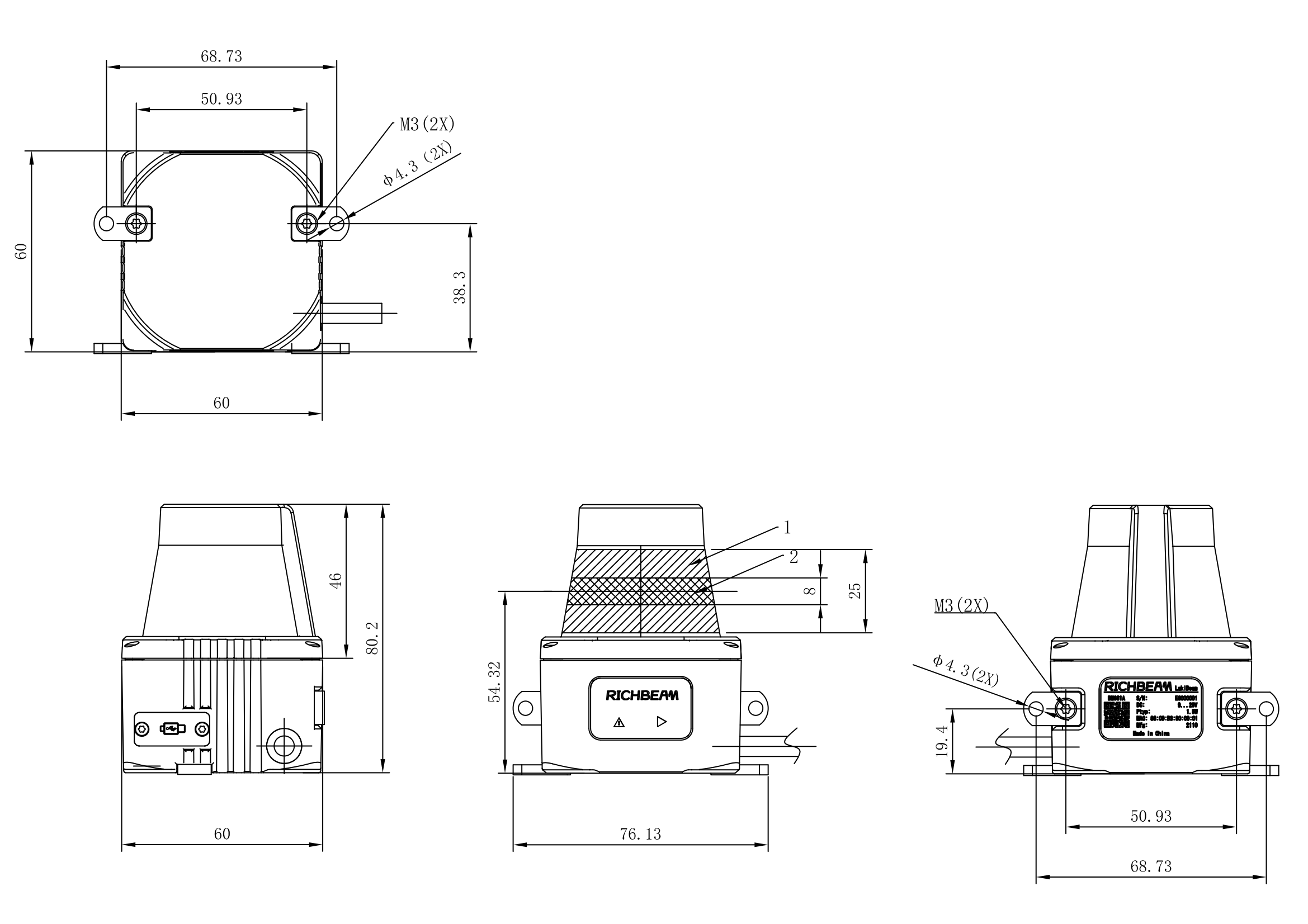
请根据下图所示的 LakiBeam 尺寸大小及安装孔位尺寸,将其安装至合适位置。
1.1.2. 坐标转换
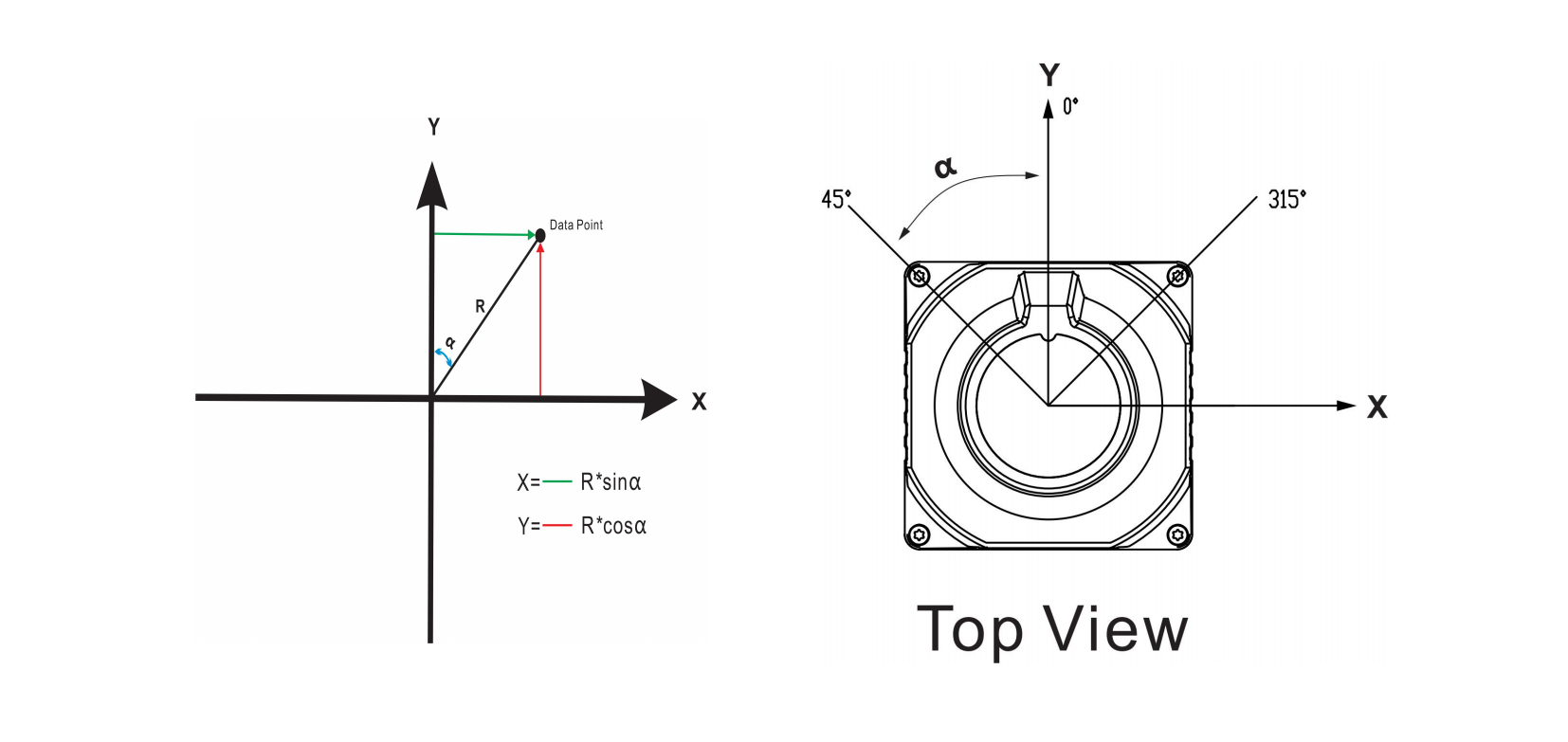
由于雷达的 MSOP 包中仅输出水平旋转角度信息和测距距离信息,因此当转化为二维点云时,需要将极坐标下的角度和测距距离信息转化为笛卡尔坐标系下的x,y坐标,如下图所示。
1.1.3. 系统配置
LakiBeam系列产品除了可以通过USB连接外还提供了一条带有RJ45插座和DC 5.5-2.1插座的电缆,用户可通过此电缆与设备建立电源及数据连接。将设备线缆的RJ45插座通过网线接入网络。为了保证连接稳定性,请选择cat.5e及以上规格的网线。将电源连接到DC 5.5-2.1插座内。
1.1.3.1. 建立连接
网线电源连接
初次使用LakiBeam系列产品时可通过网线和电源与计算机建立连接,产品默认的网络配置为静态模式,设备端的IP地址为出厂设定值192.168.198.2(Device端),需要先将连接雷达与计算机以太网端口的IP地址手动更改为192.168.198.1(Host端),此时通过计算机的web浏览器访问{http://192.168.198.2} 即可访问设备内建的web服务,如下图所示:
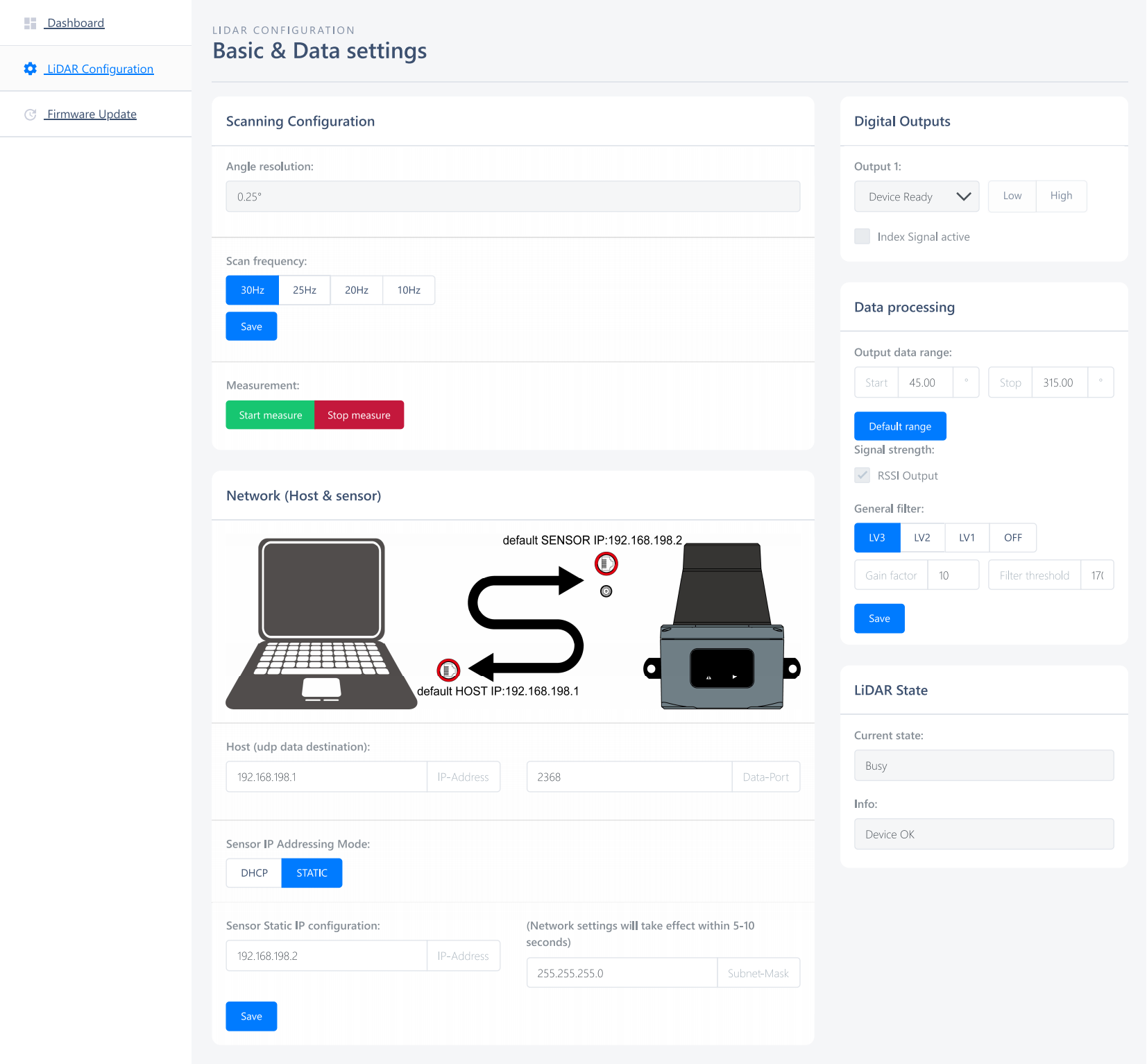
注:客户可以根据需求自行修改雷达ip地址,但需要保证雷达ip和计算机ip在同一网段,且自行设置雷达ip地址不支持8网段。
关于雷达和计算机建立连接更详细的说明可以参见: LakiBeam单线系列激光雷达操作教程
USB Type-C型数据线连接
Windows/Linux 系统
使用USB Type-C型数据线直连设备和计算机。妥善建立连接后设备需要大约30秒完成启动及自检,自检完成后计算机将识别到一个U盘以及一个网络适配器(RNDIS驱动),设备在用户端实现了一个虚拟网卡,设备内部给这个虚拟网卡通过内建的DHCP服务器固定分配一个192.168.8.1的IP地址(Host端),而设备端的IP地址则为固定的192.168.8.2(Device端)。此时通过计算机的web浏览器访问 {http://192.168.8.2} 即可访问设备内建的web服务。
macOS操作系统
macOS操作系统需要额外在识别到的U盘的根目录内建立一个名为osx.apple的文件,安全弹出设备并断电重启后macOS操作系统将会识别到一个CDC-ECM设备。然后通过计算机的web浏览器访问 {http://192.168.8.2} 即可访问设备内建的web服务。
内建的web服务提供了仪表板、雷达设置、固件更新等功能。
1.1.3.2. 下载并安装RBView
点击 官网链接 ,进入锐驰智光官方网站,即可下载最新RBView,查看点云图。
RBView 目前支持 Windows®10 及以上版本。
1.下载RBView文件。
2.双击 RBViewSetup.exe 开始安装,按提示进行操作即可完成软件安装。
3.防火墙设置。
4. 打开RBView,点击由于 LakiBeam系列产品通过网口与 RBView 连接,并向电脑持续发送 UDP 数据包,需要穿透操作系统的防火墙才能获得数据,因此在使用前需要对防火墙进行设置。
1 打开控制面板->系统和安全->允许应用通过防火墙。
2 点击“更改设置”,添加 RBView.exe 的路径,允许 RBView 通过 Windows 防火墙进行通信,点击确定完成设置。
3 程序在第一次安装完毕并使用时,操作系统会提示是否允许 RBView 访问网络,选择“允许访问”。
 图标,在弹出的 Settings 选项卡中选中 LakiBeam1(L)对应的 xml 文件,并确认 Network configuration 中雷达 IP 以及 Host IP 的设置与雷达 Web 端设置一致,点击 OK。
图标,在弹出的 Settings 选项卡中选中 LakiBeam1(L)对应的 xml 文件,并确认 Network configuration 中雷达 IP 以及 Host IP 的设置与雷达 Web 端设置一致,点击 OK。
5. 点击
 图标,查看点云数据,再次点击
图标即可暂停点云数据。
图标,查看点云数据,再次点击
图标即可暂停点云数据。
1.1.4. 数据接口
LakiBeam系列产品将在启动测距状态下持续向Host端发送测距数据。通信采用以太网为传输介质,数据包基于UDP通信协议。LakiBeam系列产品还支持基于HTTP协议的RESTful(Representational State Transfer)接口,能够帮助用户通过此接口主动请求雷达数据以及更改雷达当前状态。
1.1.4.1. 主数据流输出协议
主数据流输出协议:Main data Stream Output Protocol,简称:MSOP。
I/O 类型:设备输出,电脑解析。
默认端口号为 2368。
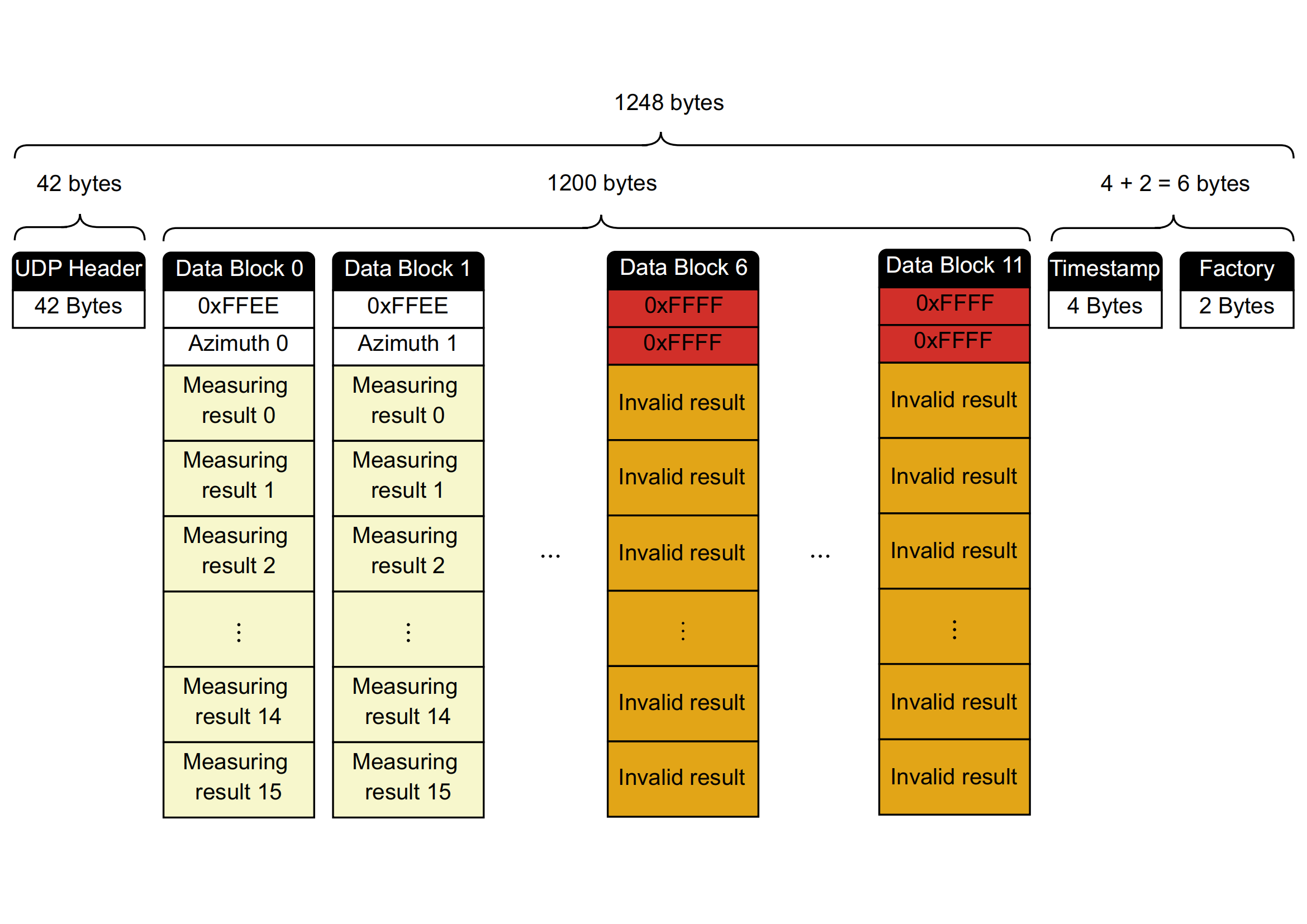
MSOP 包完成雷达测量相关数据输出,包括激光测距值、回波的反射率值、水平旋转角度值和时间戳。MSOP 包的有效载荷长度为 1248 字节,其中 42bytes 的UDP Header,1200bytes 的数据块区间(共 12 个 100bytes 的 Data Block),以及 4bytes的时间戳和 2bytes 的工厂信息位。 数据包的基本结构如下图所示:
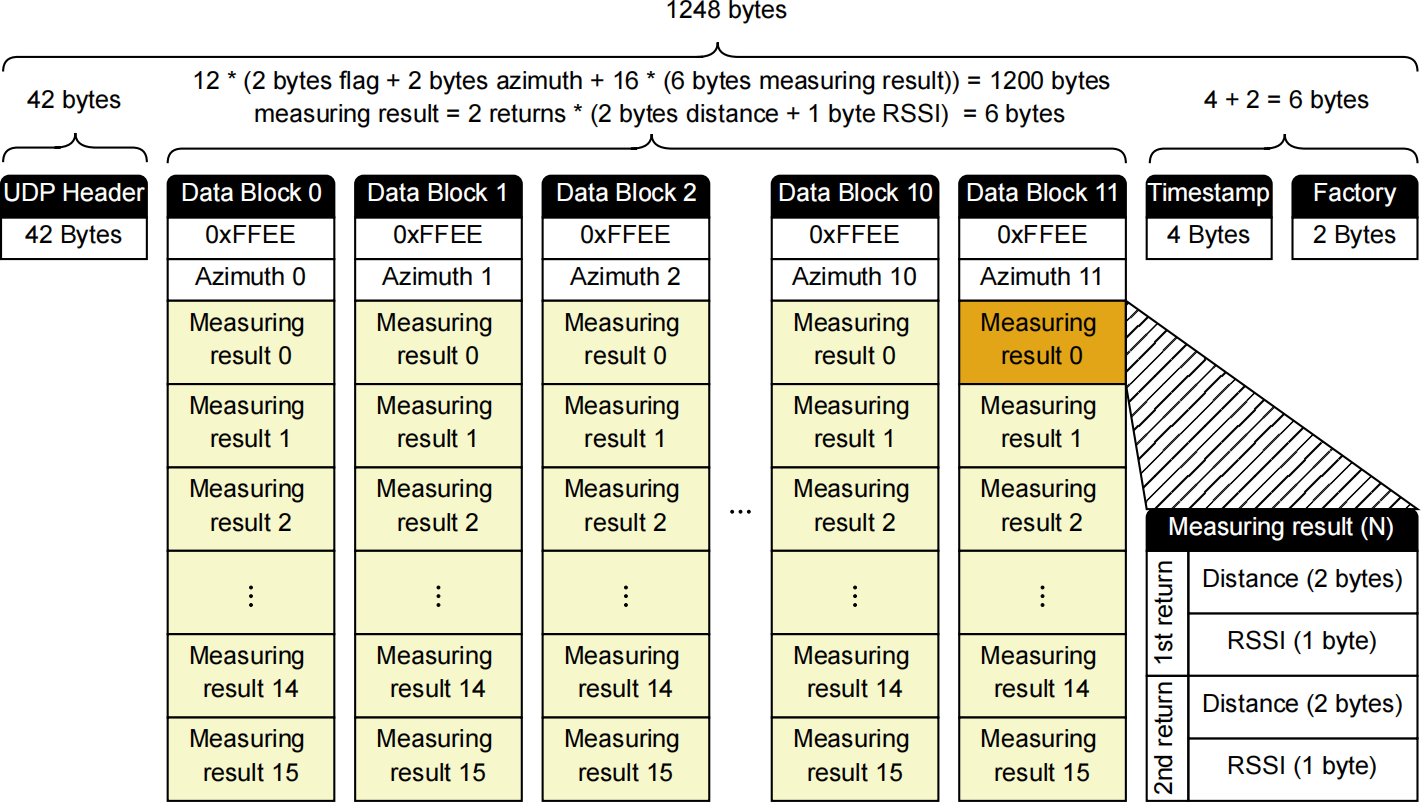
其中需要注意的是,在雷达每一圈输出的 MSOP 数据包中,最末尾的 MSOP 数据包与其他 MSOP 数据包内容并不完全相同。以20、25以及30Hz为例,当一圈数据(20,25以及30Hz下为1440组数据)输出完毕时,此时在末尾 MSOP 数据包中还剩下 96 组 数据未能填充,即最末尾的6个 Data Block 中的数据,因此自 Data Block 6开始到Data Block 11中的所有数据均为无效数据,标志位及Azimuth均为0xFFFF,所有的无效测距数据 Invalid result也均为0xFFFF, 如下图所示:
例如,在下图中,获取数据包中第一个Block水平角度值的十六进制数:0x80,0x25。
将数据组成16bit,为16bit无符号整型数据:0x2580。
转换为10进制数据为:9600。
除以100后得到结果为:96.00度。
因此第一个Block的水平角度值为96.00度。
同理可以得到第二个Block的水平角度值的十六进制数为:0x10,0x27,解算后得到水平角度值为100.00度。
因此Block中角度的递增值为:(100 - 96) ÷ 16 = 0.25°
再获取数据包中第一个Block的第2个测距数据的十六进制数:0xFC,0x08,0x31,0x00,0x00,0xFF。
其中后三个字节为最后回波数据,最后回波数据的距离信息为0,代表无回波,因此这里只进行最强回波的解析。
首先0x31代表最强回波的 RSSI,转换为10进制数据为:49,因此最强回波的反射强度为49。
然后对最强回波的距离进行解析,将数据组成16bit,为16bit无符号整型数据:0x08FC。
转换为10进制数据为:2300。
将转换后的结果转化为米得到:2.3m。
水平角度值为:96.00 + 0.25 × 1 = 96.25。因此第一个Block的第2个测距数据为:水平角度96.25°,距离2.3m,反射强度为49。

1.1.4.2. RESTful API
LakiBeam系列产品支持基于HTTP协议的RESTful(Representational State Transfer) 接口,用户不仅可以通过web server来与雷达建立连接、查看信息或修改设置,还可以通过RESTful接口直接获取雷达当前信息或修改雷达当前设置。RESTful接口每一项指定资源的URL、对应的HTTP动词以及HTTP状态码参见 LakiBeam用户手册